|
Circuito (disegnato con Fritzing) |
|
Circuit (designed with Fritzing) |
|
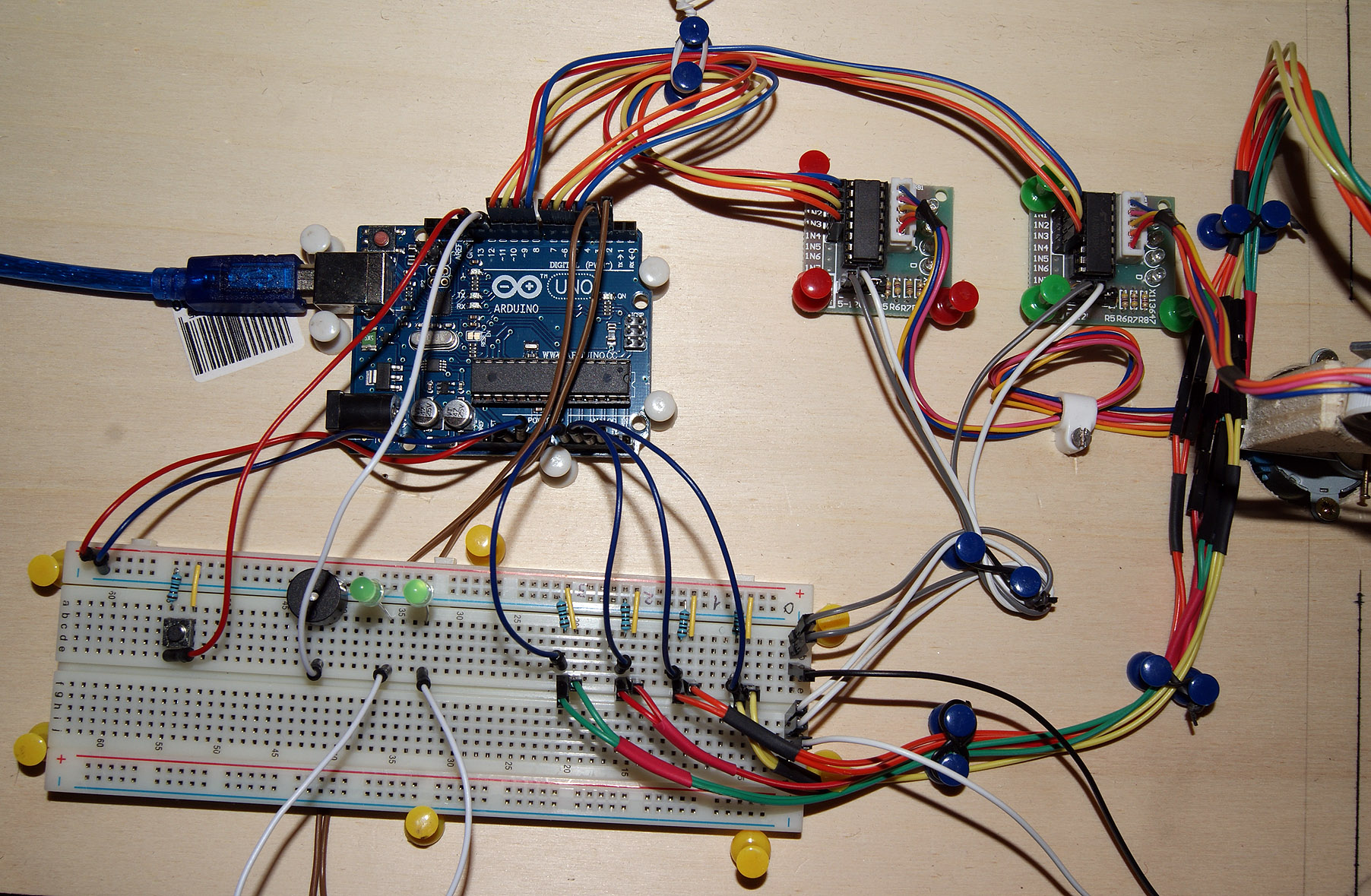
Pannello base |
|
Base panel |
|
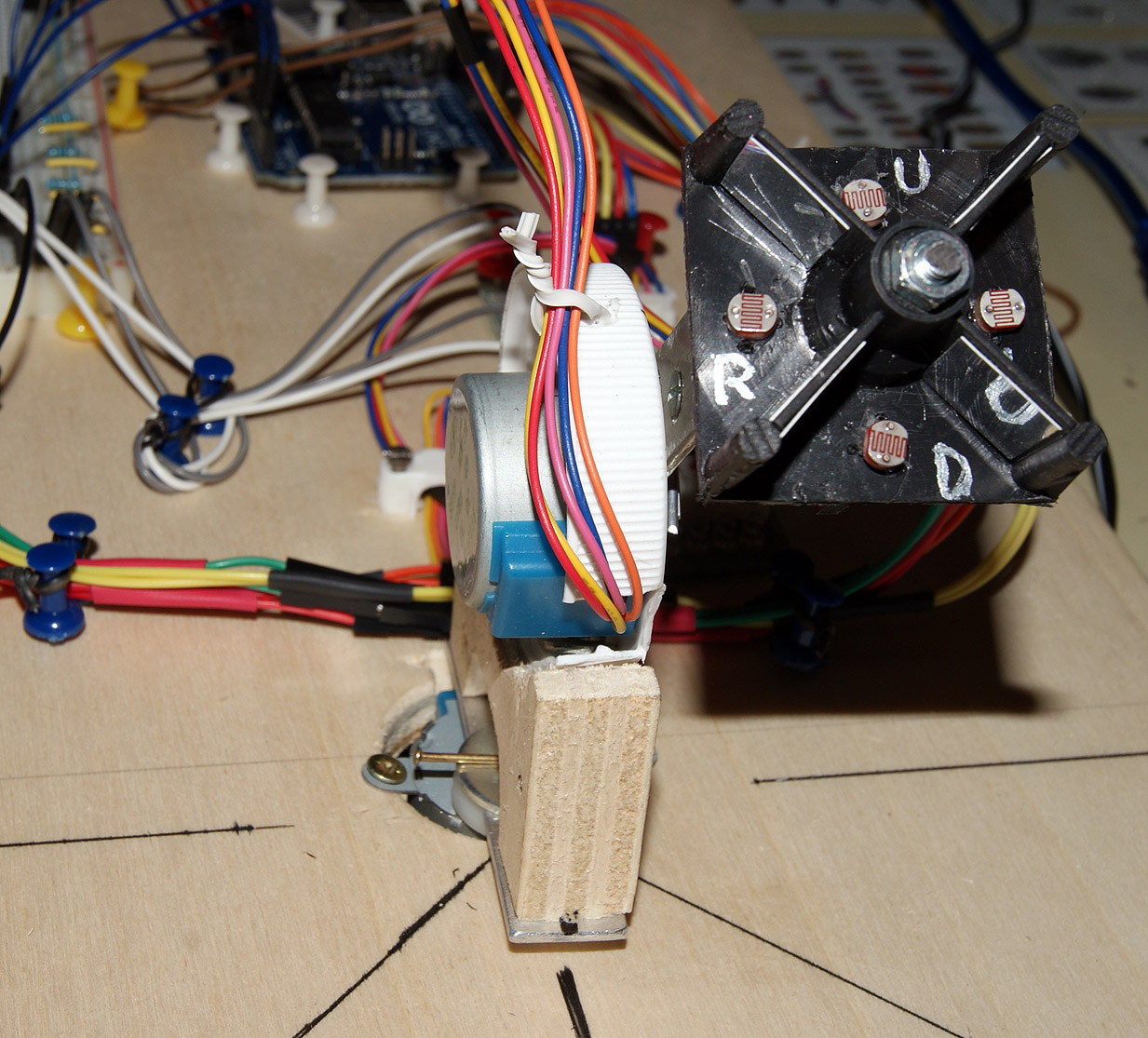
Vista anteriore con sensore (4 fotoresistenze) |
|
Front view with sensor (4 photoresistors) |
|
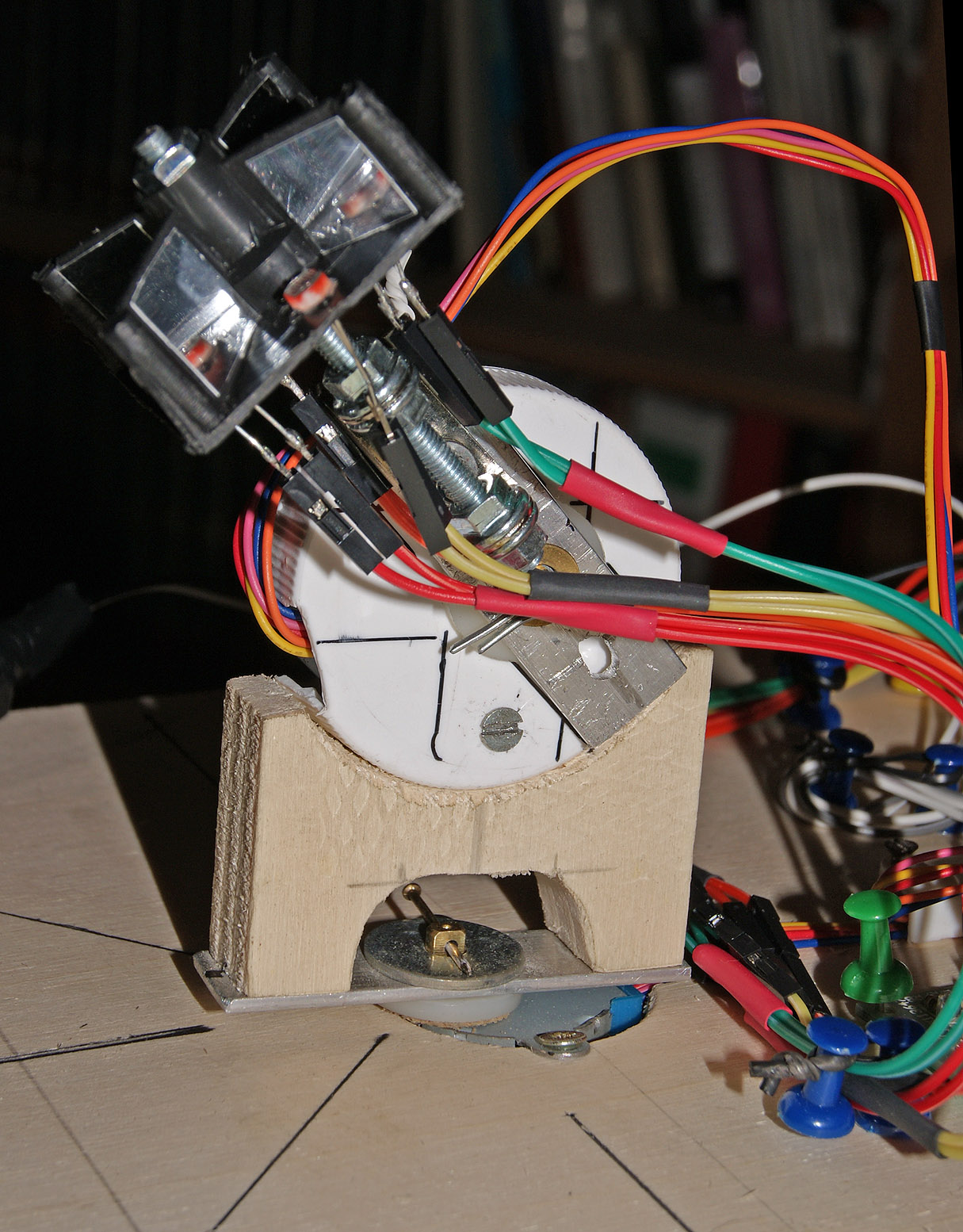
Torretta, lato del braccio del sensore |
|
Turret, sensor arm side |
|
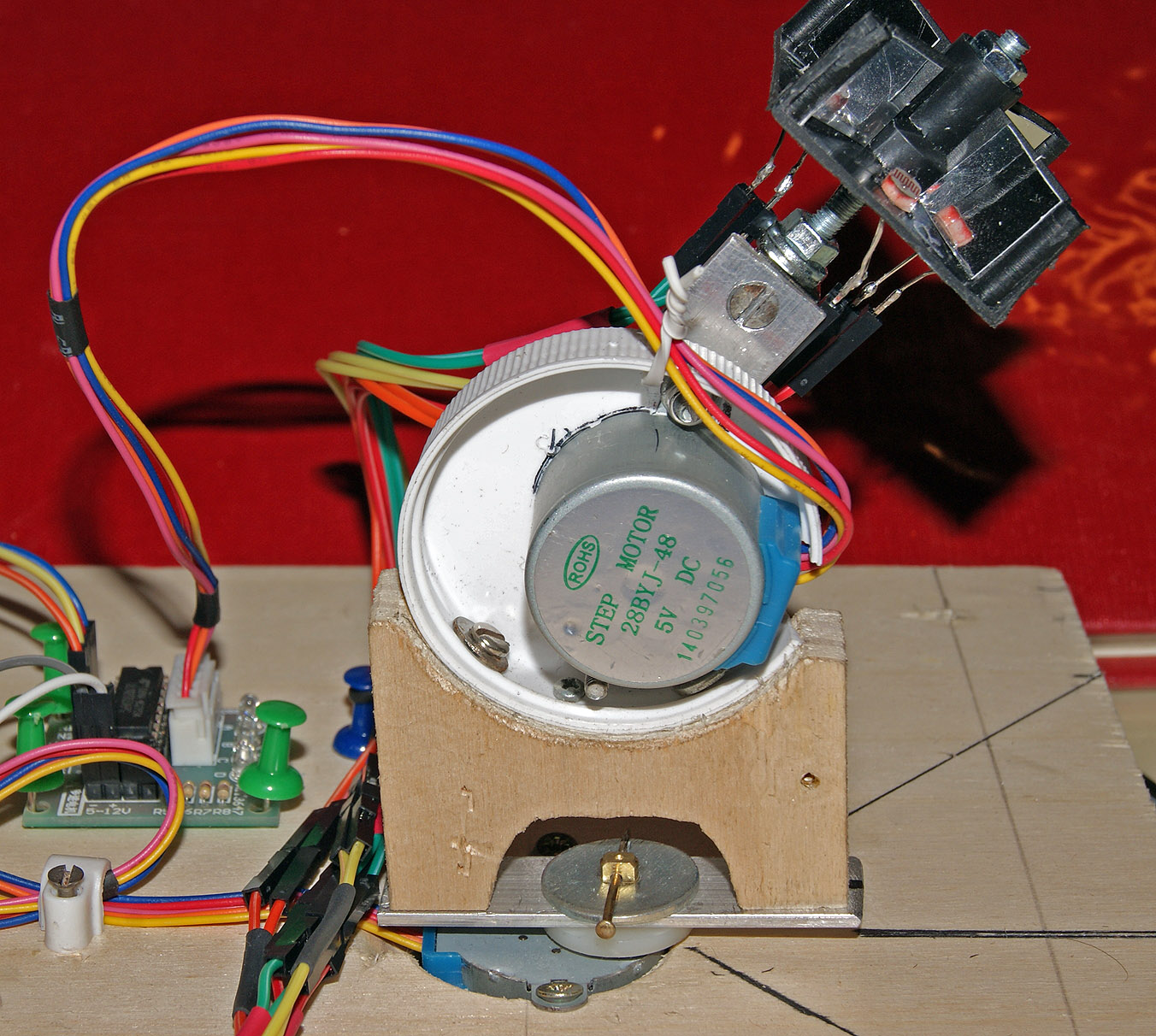
Torretta, lato dello stepper verticale |
|
Turret, vertical stepper side |
|
Consigli per la costruzione |
|
Manufacturing hints |
❦